FutureHand
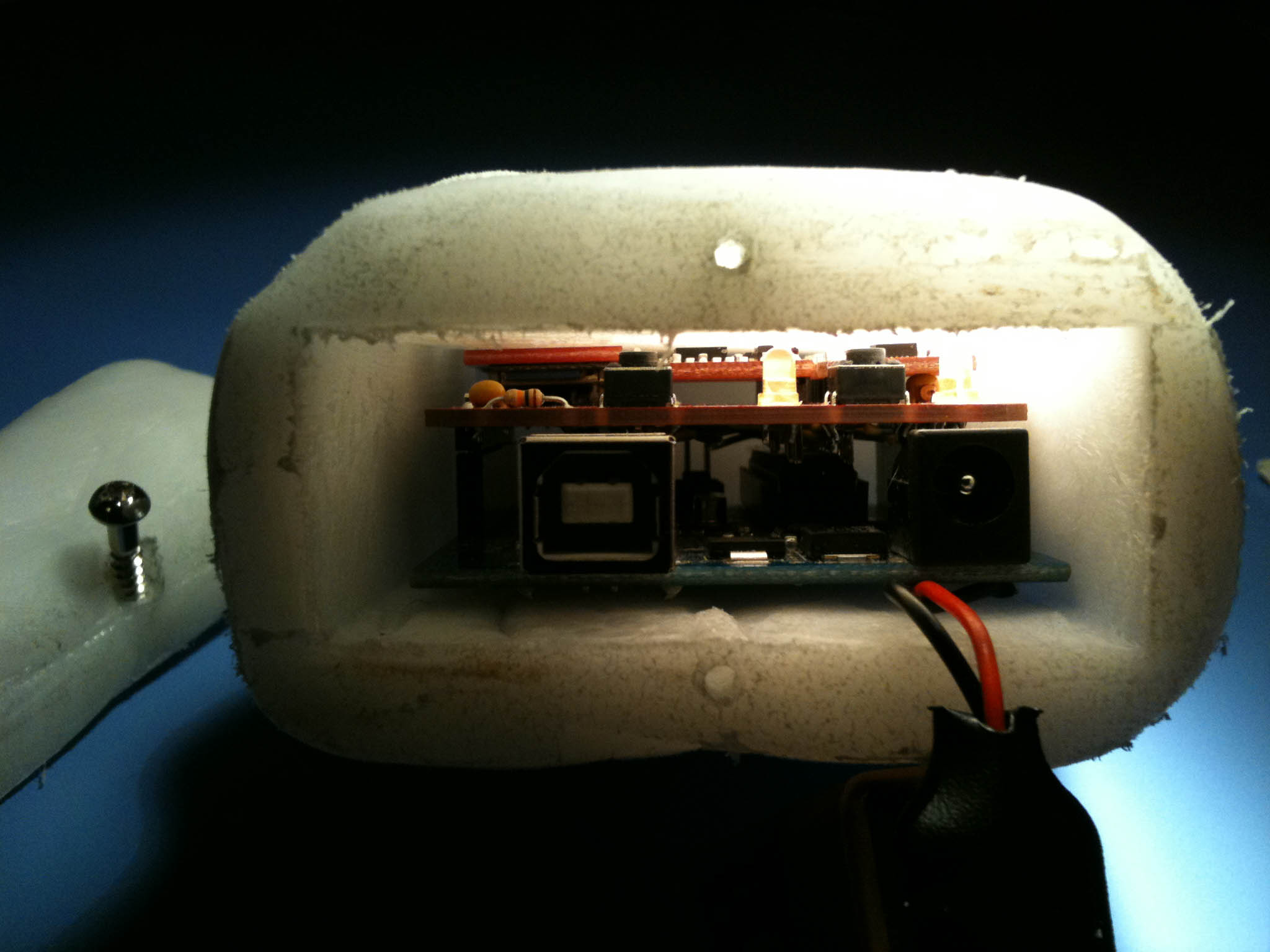
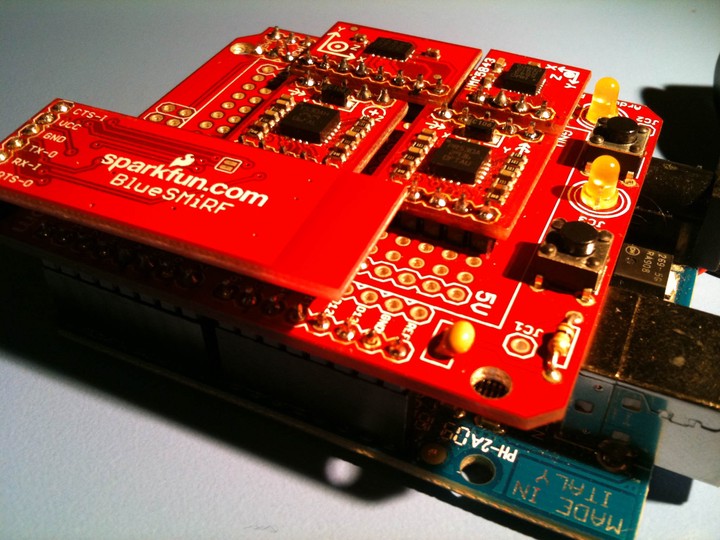 FutureHand circuitry.
FutureHand circuitry.
The FutureHand was inspired by Pranav Mistry’s 2009 TED talk on the Sixth Sense device. I was interested in exploring novel human computer interfaces and felt that the ubiquitous 2-DOF mouse could be augmented to instead operate in 6 dimensions: the 3 translational (x, y, z) and the 3 rotational dimensions (yaw, pitch, roll).
The FutureHand is a home-brew inertial measurement unit (IMU) integrated into a bluetooth USB device. A pair of gyroscopes were used to capture rapid rotational changes, as well as measure the absolute rotations through dead reckoning. An accelerometer and magnetometer were used to measure translational changes, as well as combined with the gyroscope rotation estimates through complementary filters to allow for more accurate absolute rotations.
The FutureHand was then augmented with a Bluetooth chip, and inserted into a custom molded case, allowing for easy use as a 6-DOF mouse. This novel controller was integrated into the Moonweasel project, the 3-dimensional space flight simulator, allowing for more precise flight control.